近日,Ximmerse研发X-Lab明星团队(aka. Ximmerse Research Lab)在国际顶级学术期刊IEEE Transactions on Visualization and Computer Graphics (IEEE TVCG 2020)发表了题为“TopoTag: A Robust and Scalable Topological Fiducial Marker System”的论文。
TVCG英文全称IEEE Transactions on Visualization and Computer Graphics,是 IEEE 计算机协会主办的顶级期刊之一,主要收录计算机图形学、信息与科学可视化、系统、软件、硬件、用户交互、虚拟/增强现实等领域的优秀研究成果。TOG、TVCG、TIP是计算机图形学与多媒体领域仅有的3个A类期刊。
传统的视觉定位往往对环境的纹理有一定的要求,例如纹理必须足够丰富,否则定位就会很不准确。而人工标记码对使用环境无特定要求,即使环境内无任何纹理信息。也不会干扰其定位的精准度。而且只需要单张图片就可以精确恢复出人工标记码和拍摄相机之间的6维姿态信息(也就是经常提到的6-DoF信息,包含3维位置信息和3维旋转信息。由于人工标记码较高的鲁棒性,最早广泛应用于机器人定位/导航领域,最近几年随着VR/AR/MR的兴起,也得到越来越多的应用。
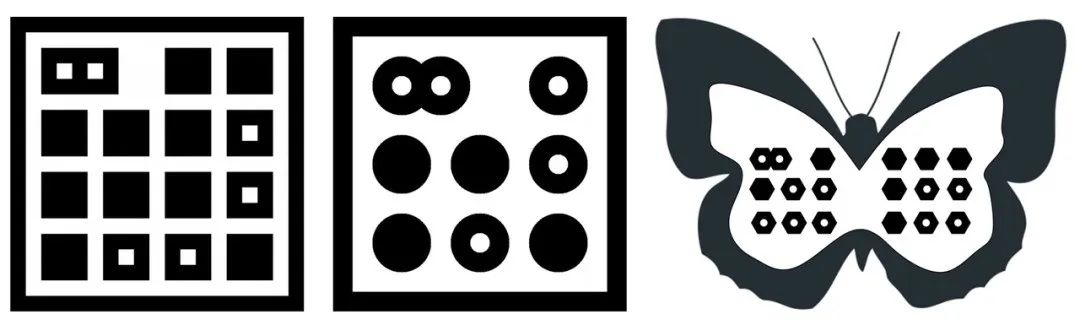
虽然已经存在很多种人工标记码(详见下图1), 但燧光XIMMERSE在尝试分析这些工作在VR/AR/MR的具体应用时,发现很多工作在以下一个或者几个方面存在不足,包括:
1. 定位精准度仍有局限,例如定位准度不高,定位抖动较大等
2. 支持的ID个数有限,对大批量应用存在限制
3. 形状较固定,无法适配个性化的需求

该研究的重大意义
本次算法团队对基于人工标记码的跟踪定位技术进行了深入的研究探索,团队为克服这些问题,创造性的提出了一种基于拓扑结构的人工标记码。该研究的重大意义在于:
(1)提供更多姿态解算点,以提高跟踪定位精准度和鲁棒(Robustness);
(2)在不同测试条件下达到最好的跟踪精准度;
(3)具有超强可扩展性,可扩展出更多的ID以满足丰富应用需求。
例如:5x5大小的TopoTag即可以支持超过800万个不同ID, 而且随着码内部布局的扩展可以支持更多的ID;此外,TopoTag不限制码的形状,可以根据应用场景设计为不同的样式,对于应用场景十分友好。
今后燧光XIMMERSE (X-Lab)团队将继续探索视觉定位、物体识别、自然物体交互、多传感器融合、场景重建等相关领域的前沿技术,并持续挖掘其在VR/AR/MR领域的应用。团队也乐于和业界以及学术界分享我们最新的成果, 致力用领先科技推动VR/AR/MR行业快速发展,为各领域赋能,提升效率,创造价值。在空间计算时代为人机交互开启更多可能性!